About Me
Hello! I'm Abel, a PhD student at the University of New Mexico. I am working with Dr. Wenbin Wan at the Optimization and Estimation Lab (ONELab) as a National Science Foundation Graduate Research Fellow. I am also a RAISE fellow for the upcoming cohort. I received my BS in Mechanical Engineering from UNM in the spring of 2025.
My research interests are broadly about autonomous systems. I'm currently exploring estimation and control, with a focus on positive systems and interval estimation
Curriculum VitaeProjects
Autonomous System Trajectory Tracking in Unity Engine
As part of my Undergraduate Honors Thesis, I created an autonomous system simulation software framework connecting Python and Unity Engine. Using sockets, I was able to get a spherical physics object in Unity to communicate with Python to send information back and forth so that the sphere could be driven to some desired target coordinate. The figure below shows the autonomous system circuit design, with the blue block signifying execution in Unity and the red blocks signifying execution in Python.
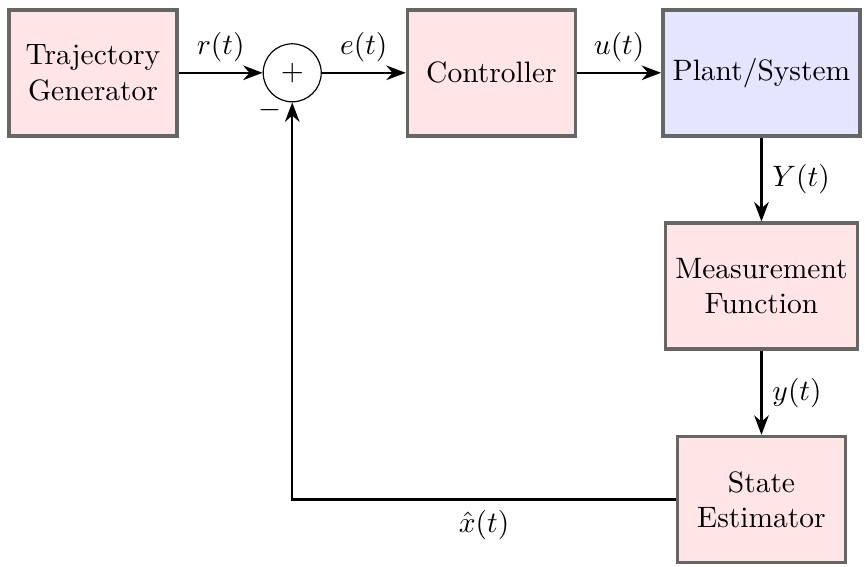
Figure: Autonomous System Diagram
Resources to Learn Estimation and Control
Learning the basics of state estimation required going above and beyond my university education. Here are some very helpful resources.
Kalman and Bayesian Filering Jupyter Notebook
Roger Labbe created a jupyter notebook that has concise examples along with good motivation for a topic that can be very esoteric. The Jupyter notebook does not have in depth mathematical derivations or theory, it is focused on practical explanations and implementations of concepts learned in Python. This work helped me get a grip on why anyone would care about state estimation and what the implementation looks like via examples.
Optimal State Estimation by Dan Simon
Dr. Dan Simon's book on state estimation is a crucial and in-depth resource for the theoretical aspects of state estimation, especially Kalman filtering. The book includes the necessary mathematical prerequisites and derivations to gain a complete picture of the theoretical parts of state estimation. The book is especially helpful while taking a relevant course or participating in a reading group.
ECE5530: Multivariable Control Systems II
Taught by Dr. Gregory Plett from the University of Colorado at Colorado Springs, this has proven to be a great theoretical resource for learning estimation and control. Dr. Plett's notes on the linear quadratic estimator (Kalman Filter), linear quadratic regulator, and linear quadratic Gaussian are excellent resources for people who already have a good starting point in the relevant statistical/math topics.
Optimal Control Quadratic Methods by Anderson and Moore
This is a great book to learn about linear optimal control and especially the linear quadratic regulator. The authors introduce the Principle of Optimality and the Hamilton Jacobi Equations, which are very important in control optimization, and applying them to the LQR, one of the most simple and elegant optimal controllers.
Frequency Domain for Beginners
Dr. Justin Ruths from the University of Texas at Dallas has very accessable intro to frequency domain lectures on his youtube channel under the MECH 4310 playlist. Especially useful to understand Nyquist criterion theory.